 Réglages du comportement volant — Comprendre et optimiser son kit autoguidage eSurvey
Réglages du comportement volant — Comprendre et optimiser son kit autoguidage eSurvey
Après plusieurs saisons d’utilisation terrain, on reçoit souvent les mêmes questions sur les réglages volant de la console eSurvey. Volant trop vif, trop mou, qui oscille, qui tarde à prendre la ligne… Dans la grande majorité des cas, la réponse se trouve dans cet écran de configuration.
Ce tutoriel passe en revue chaque paramètre, avec des valeurs de départ éprouvées et les cas dans lesquels vous pourrez avoir besoin d’y toucher.
 Facteurs de correction par plage de vitesse
Facteurs de correction par plage de vitesse
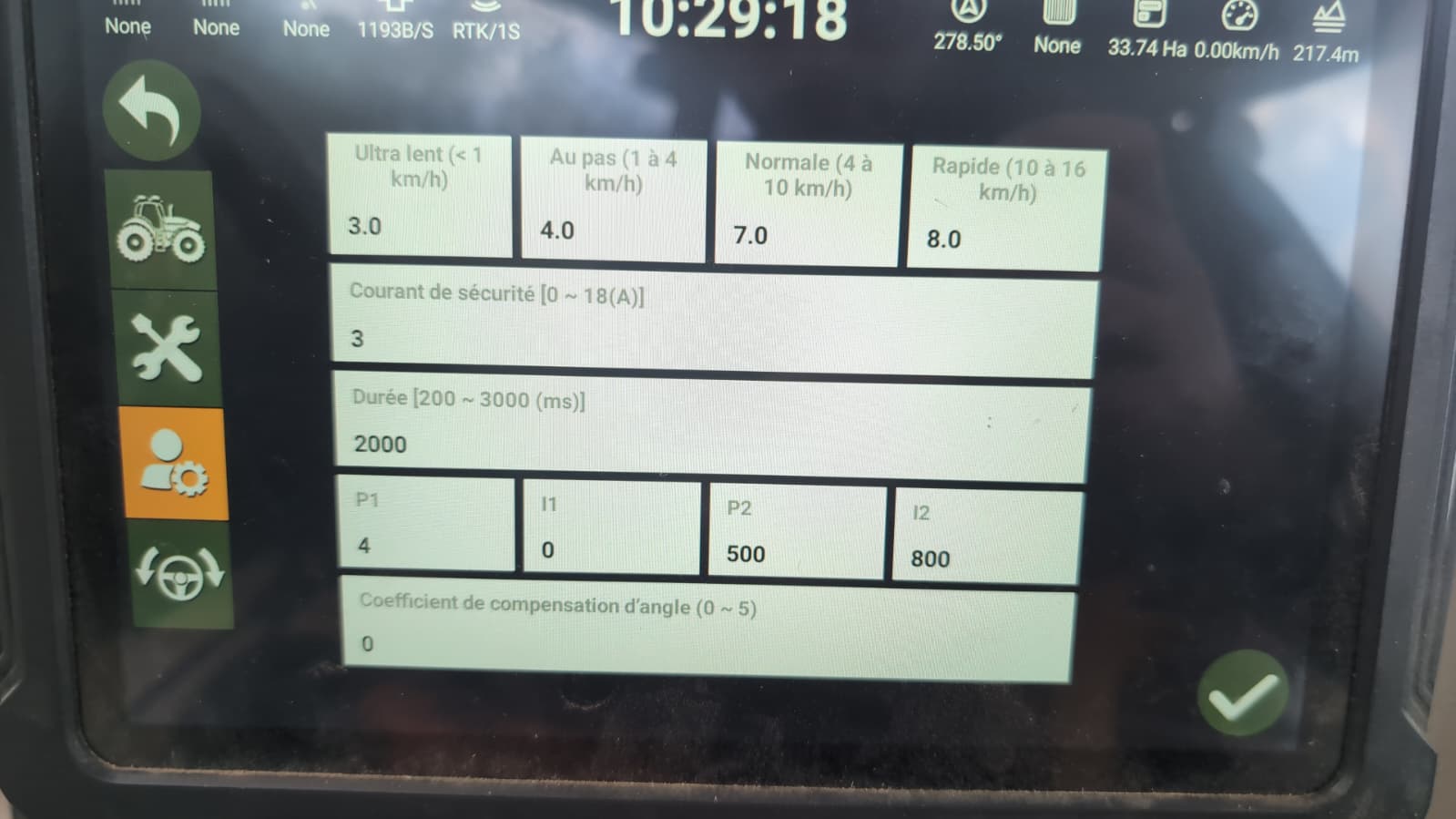
La première ligne de l’écran contient quatre valeurs correspondant à quatre plages de vitesse :
| Plage | Vitesse | Valeur conseillée |
|---|---|---|
| Ultra lent | < 1 km/h | 3.0 |
| Au pas | 1 à 4 km/h | 4.0 |
| Normale | 4 à 10 km/h | 7.0 |
| Rapide | 10 à 16 km/h | 8.0 |
Ces valeurs agissent comme un facteur multiplicateur sur une plage de vitesse :
 Augmenter la valeur → correction plus douce, moins nerveuse
Augmenter la valeur → correction plus douce, moins nerveuse Réduire la valeur → correction plus vive, plus réactive
Réduire la valeur → correction plus vive, plus réactive
Les valeurs de la capture d’écran sont de bons passe-partout pour une utilisation classique. On vous conseille de rester dessus en point de départ.
Mais en général on reste sur les valeus d’origine
Exemple concret : votre tracteur peine à tenir son cap au-delà de 10 km/h ? Réduisez le facteur Rapide de 8 à 7, et observez le comportement sur un passage.
 Courant de sécurité
Courant de sécurité
Valeur conseillée : 5 A
Il s’agit du seuil de désengagement manuel du guidage. Quand vous bloquez physiquement le volant, le moteur génère une intensité croissante — dès qu’elle atteint la valeur configurée, le guidage se désengage automatiquement.
C’est un paramètre de sécurité mécanique, pas un confort de pilotage : il protège le moteur volant d’une surtension. On ne désenclenche pas son guidage en forçant contre le moteur.
 Les paramètres PID — Proportionnel, Intégral, Dérivé
Les paramètres PID — Proportionnel, Intégral, Dérivé
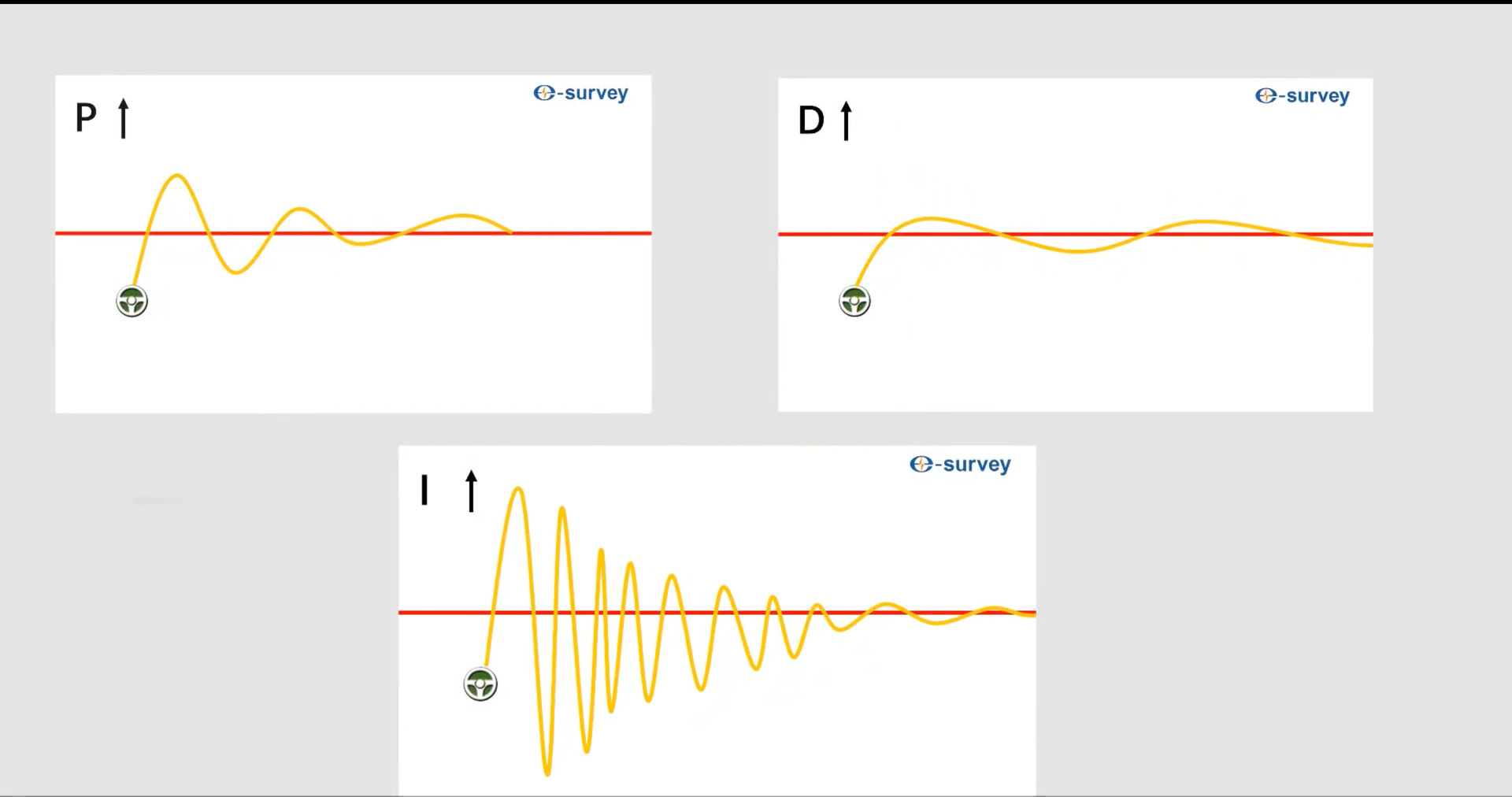
C’est le cœur du réglage comportemental. Le PID est l’algorithme qui calcule comment corriger l’erreur de trajectoire à chaque instant. Voici ce que font visuellement les trois composantes :
 Durée — La longueur de l’onde de correction
Durée — La longueur de l’onde de correction
Valeur conseillée : 2000 ms
Ce paramètre définit sur quelle durée l’algorithme lisse sa correction. Plus la durée est longue, plus le volant est patient et progressif. Plus elle est courte, plus il devient réactif et sec.
C’est une question de préférence personnelle :
- On préfère un guidage qui flotte légèrement autour de la ligne plutôt qu’un guidage qui corrige en permanence par petits à-coups.
- Si vous souhaitez un suivi de ligne plus dynamique, vous pouvez descendre vers 1500 ms.
 P1 / P2 — Le gain proportionnel (basse et haute vitesse)
P1 / P2 — Le gain proportionnel (basse et haute vitesse)
P1 (basse vitesse) — Valeur conseillée : 4 à 5
P2 (haute vitesse) — Valeur conseillée : 500
Le gain proportionnel détermine l’intensité de la réponse en fonction de l’écart à la ligne : plus l’écart est grand, plus la correction est forte — et P amplifie ce rapport.
- Augmenter P1 → prise de ligne plus rapide et insistante
- Réduire P1 → approche plus progressive et douce
Pour P2, la logique est identique mais s’applique aux vitesses plus élevées. Nos valeurs terrain donnent de bons résultats — inutile d’y toucher sans raison précise.
 I1 / I2 — Le gain intégral (basse et haute vitesse)
I1 / I2 — Le gain intégral (basse et haute vitesse)
I1 (basse vitesse) — Valeur conseillée : 0
I2 (haute vitesse) — Valeur conseillée : 800
Le terme intégral accumule l’erreur de trajectoire dans le temps. Son rôle est de corriger les dérives persistantes que le seul gain proportionnel ne parvient pas à éliminer — par exemple, un léger biais constant dû à un dévers ou à un outil qui tire d’un côté.
Le problème : trop de I, et le volant surchorrige, créant des oscillations de plus en plus larges avant de finalement converger (voir le graphique I↑ dans l’image PID). C’est l’effet le plus instabilisant du PID.
Laissez I1 à 0 dans la très grande majorité des cas. Un I non nul à basse vitesse se traduit souvent par des micro-corrections désagréables sans bénéfice réel.
 Coefficient de compensation d’angle
Coefficient de compensation d’angle
Valeur conseillée : 0
Ce paramètre atténue l’influence du roulis et du tangage sur le calcul de trajectoire. Autrement dit, quand le tracteur penche (dévers, labour, terrain accidenté), la centrale inertielle capte cet angle — et sans compensation, le guidage peut sur-corriger en pensant que vous dérivez.
| Situation | Valeur |
|---|---|
| Champ plat, semis direct | 0 |
| Dévers modéré, labour | 1 à 2 |
| Forte pente, labour en travers | 3 à 4 |
Dans la pratique, nous laissons cette valeur à 0 dans beaucoup de situations, y compris en dévers. L’algorithme de guidage gère bien ces cas sans compensation manuelle sur notre matériel.
 Récapitulatif des valeurs conseillées
Récapitulatif des valeurs conseillées
| Paramètre | Valeur conseillée | Intervenir si… |
|---|---|---|
| Ultra lent | 3.0 | Comportement trop vif/mou < 1 km/h SI trop vif augmenter / Si trop mou baisser |
| Au pas | 4.0 | Comportement trop vif/mou 1-4 km/h |
| Normale | 7.0 | Comportement trop vif/mou 4-10 km/h |
| Rapide | 8.0 | Peine à tenir le cap au-delà de 10 km/h |
| Courant sécurité | 5 A | Direction d’origine très dure et monter a 10 |
| Durée | 2000 ms | Préférence personnelle de dynamisme |
| P1 | 4–5 | Outil frontal, prise de ligne lente monter jusqu’a 15 |
| I1 | 0 | Outil frontal avec dérive latérale monter progressivement |
| P2 | 500 | (ne pas toucher) |
| I2 | 800 | (ne pas toucher) |
| Compensation angle | 0 | Terrain très accidenté en dévers |
 Synthèse — Ce qu’il faut retenir
Synthèse — Ce qu’il faut retenir
Tous ces paramètres peuvent faire peur au premier abord, mais en conditions normales vous n’avez pas à y toucher. Nos valeurs par défaut sont des passe-partout qui fonctionnent sur la très grande majorité des configurations.
Voici les trois cas qui justifient d’intervenir :
![]() Vous voulez plus de vigueur dans la prise de ligne
Vous voulez plus de vigueur dans la prise de ligne
Augmentez P1 progressivement. Vous pouvez monter jusqu’à 12, par pas de 1 ou 2, en observant le comportement entre chaque modification. Ne montez pas trop vite.
![]() Vous avez un outil frontal ou quelque chose qui contraint votre direction
Vous avez un outil frontal ou quelque chose qui contraint votre direction
Vous pouvez introduire un peu de I1, mais de façon très modérée. Une valeur entre 1 et 3 suffit dans la plupart des cas. Au-delà, le risque d’oscillations augmente rapidement.
![]() Vous avez un vieux tracteur et vous voyez une alerte de surintensité
Vous avez un vieux tracteur et vous voyez une alerte de surintensité
C’est souvent le signe d’une direction d’origine un peu dure. Remontez le courant de sécurité, vous pouvez aller jusqu’à 10 A sur ce type de matériel.
![]() Avant d’augmenter ce seuil, vérifiez quand même votre montage : si la bague du moteur volant frotte sur une pièce fixe, elle va générer une résistance anormale et échauffer le moteur. Une intensité élevée peut être le symptôme d’un problème mécanique à corriger en priorité.
Avant d’augmenter ce seuil, vérifiez quand même votre montage : si la bague du moteur volant frotte sur une pièce fixe, elle va générer une résistance anormale et échauffer le moteur. Une intensité élevée peut être le symptôme d’un problème mécanique à corriger en priorité.
 Retrouvez notre matériel
Retrouvez notre matériel
Des questions sur vos réglages ? Postez ici avec votre modèle de tracteur et l’outil attelé, on vous aide à affiner. ![]()